
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

فناوری فریب ناوبری هواپیماهای بدون سرنشین
فریب ناوبری هدف قرار دادن پهپادها به طور کلی به استفاده از ابزارهای فنی خاص برای تزریق اطلاعات ناوبری تهدید نادرست تنظیم شده به طور مصنوعی به پهپادهای غیرقانونی اشاره دارد که باعث می شود سیستم ناوبری ماهواره ای خود پهپاد موقعیت خود را به اشتباه تعیین کند و در نتیجه برنامه ریزی مسیر و کنترل پرواز نادرست را انجام دهد و در نتیجه به موفقیت برسد. هدف از راندن پهپاد یا فرود اجباری در مکان تعیین شده است. با توجه به این واقعیت که پهپادهای اصلی در حال حاضر ازسیستم ناوبری ماهواره ای جهانی(GNSS) به عنوان منبع اصلی اطلاعات ناوبری، فناوری فریب ناوبری می تواند تقریباً بر همه هواپیماهای بدون سرنشین، به ویژه هواپیماهای بدون سرنشین غیرنظامی تأثیر بگذارد و کاربرد خوبی دارد. در استفاده عملی، تجهیزات هدایت ناوبری هواپیماهای بدون سرنشین مبتنی بر زمین به طور کلی سیگنالهای ناوبری شبه را منتشر میکنند که شباهت خاصی به سیگنال GNSS واقعی پهپاد دارند، و کاربران مربوطه را مجبور میکنند چنین سیگنالهای ناوبری شبه ناوبری را در ترمینال گیرنده دریافت و محاسبه کنند، در نتیجه پهپاد نادرست دریافت میکند. اطلاعات موقعیت، سرعت و زمان در شرایط پنهان و قادر به شناسایی موثر آن نیستند. لازم به ذکر است که فریب ناوبری با تداخل ناوبری متفاوت است. تداخل سرکوب ناوبری معمولاً از پارازیتهای پرقدرت برای انتقال انواع مختلف سیگنالهای سرکوب استفاده میکند که باعث میشود گیرنده هدف نتواند سیگنالهای ناوبری معمولی را دریافت کند و کاربران نتوانند نتایج ناوبری، موقعیتیابی و زمانبندی را به دست آورند و در نتیجه سیستم ناوبری در دسترس نباشد. با توجه به این واقعیت که فریب ناوبری اغلب به قدرت انتقال خیلی قوی نیاز ندارد، مخفی کاری خوبی دارد و می تواند تا حدودی کاربران مربوطه را به مسیری اشتباه راهنمایی کند، این نیز باعث می شود که فریب ناوبری در عمل اثرات کاربردی خوبی داشته باشد.


در حال حاضر، دو فناوری اصلی فریب ناوبری برای هواپیماهای بدون سرنشین وجود دارد:
1) فریب ارسال
همانطور که از نام آن پیداست، فریب پیشروی به قرار دادن یک گیرنده GNSS در اطراف هدف مورد فریب، ذخیره و ارسال سیگنال واقعی GNSS به هدف برای دستیابی به اثر فریب اشاره دارد. به طور کلی، با توجه به وقوع اجتناب ناپذیر تاخیر در رسیدن سیگنال در هنگام دریافت، ذخیره سازی، پردازش و ارسال سیگنال، تداخل ارسال را می توان بر اساس وجود تاخیر انسانی در تاخیر، به فریب ارسال مستقیم و فریب ارسال تاخیری تقسیم کرد. با توجه به اینکه پارازیت فریب رو به جلو مستقیماً سیگنال واقعی را ارسال می کند، به این معنی است که تا زمانی که سیگنال فعلی قابل دریافت باشد، می توان فریب را انجام داد. بنابراین، نیازی به دانستن ساختار شبه کد سیگنال از قبل نیست، به خصوص بدون درک جزئیات پیاده سازی خاص کد GPS M (Y). بنابراین، سیگنال های GPS نظامی را می توان به طور مستقیم فریب داد. با این حال، با توجه به این واقعیت که تاخیر سیگنال فریب ارسال شده به گیرنده می رسد همیشه بیشتر از تاخیر سیگنال واقعی است. به دلیل ناتوانی در تغییر ساختار شبه کد و تنها مقدار اندازهگیری شبه فاصله در طول فرآیند فریب، انعطافپذیری کنترل تداخل فریب رو به جلو همزمان نسبتا ضعیف است، اغلب به استراتژیهای کنترل تاخیر به جلو پیچیدهتری نیاز دارد، و همچنین محدودیتهای خاصی در محل استقرار دستگاه های حمل و نقل برای گیرنده هایی که قبلاً به ردیابی پایدار سیگنال های GPS دست یافته اند، پارازیت فریب رو به جلو تنها زمانی مؤثر است که تأخیر بین سیگنال رو به جلو و سیگنال مستقیم در مرکز فاز آنتن گیرنده هدف به دلیل فاز کد شبه آن کمتر از یک تراشه باشد. ساعت از سیگنال واقعی عقب مانده است. علاوه بر این، تحقیقات نشان داده است که با توجه به این واقعیت که گیرنده های GPS به طور معمول چندین سیگنال ماهواره ای (معمولاً بیشتر از 10 کانال) دریافت می کنند، اغلب لازم است سیگنال های ماهواره ای متعددی را در حین فریب دریافت و ارسال کنند. با این حال، در عمل، اگر از روش تک ایستگاهی و تک آنتنی برای فوروارد استفاده شود، غالباً ارسال همزمان بیش از چهار کانال (به استثنای چهار کانال) سیگنال های ماهواره ای غیرممکن است و چندین سیگنال باید در یک ایستگاه حمل و نقل ارسال شوند. که اغلب منجر به حجم زیادی از ایستگاه های حمل و نقل می شود، سیگنال های جعل حمل و نقل نیز به راحتی شناسایی می شوند. بنابراین، استفاده از جعل فوروارد اغلب در عمل محدود است.


(2) فریب تولیدی
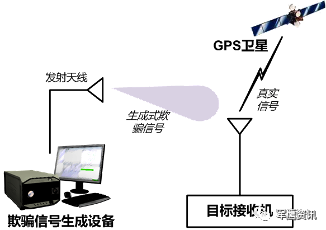
اصل اساسی فریب مولد استفاده از دستگاه های فریب برای محاسبه در زمان واقعی پارامترهای لازم مانند تاخیر فاز کد، داپلر حامل، پیام ناوبری و غیره سیگنال GNSS است که کاربر باید در موقعیت از پیش تعیین شده کاربر مورد انتظار دریافت کند. . بر این اساس، یک سیگنال GNSS کاذب در آن نقطه تولید می شود و از طریق آنتن فرستنده به شی فریب تابش می کند، سیگنال GNSS واقعی را با مزیت قدرت سیگنال کاذب پوشانده، باعث می شود که به تدریج فاز شبه کد مشخص شده را ردیابی و ضبط کند. حامل داپلر سیگنال فریب، به طوری که هدف مورد فریب می تواند مقادیر اندازه گیری دامنه کاذب نادرست را بدست آورد و سپس اطلاعات موقعیت نادرست را محاسبه کند و در نهایت به هدف فریب دست یابد. اصل اساسی این روش در شکل زیر نشان داده شده است:
فریب مولد مستلزم درک کامل داده ها و ساختار فرکانس سیگنال های GNSS، مانند ساختارهای شبه کد، پیام های ناوبری و غیره است که اجرای فریب مولد روی سیگنال های کد P (Y) را دشوار می کند. با توجه به این واقعیت که پارازیت فریب مولد از دستگاه خود برای تولید سیگنالهای فریب استفاده میکند و به سیستم GNSS متکی نیست، طرف فریب میتواند آزادانه پیام ناوبری و زمان ارسال سیگنال را تعیین کند، که به سیگنال فریب اجازه میدهد تا با تاخیر به گیرنده برسد. یا جلوتر از سیگنال واقعی. بنابراین تداخل مولد میتواند گیرنده هدف را از طریق روشهای مختلفی مانند تغییر مقادیر اندازهگیری تجربی ورود و دستکاری در ephemeris/almanacs ماهوارهای فریب دهد. علاوه بر این، از آنجایی که سیگنالهای GNSS در واقع سیگنالهای طیف گسترده توالی مستقیم هستند که در یک دوره کد مشخص تکرار میشوند، تحقیقات نشان داده است که سیگنالهای فریب مولد میتوانند به طور خودکار فاز کد را با سیگنال واقعی در طولانیترین دوره کد شبه (1 میلیثانیه برای سیگنالهای GPS L1 مطابقت دهند. و حلقه ردیابی شبه کد گیرنده را بکشید تا سیگنال فریب را از طریق قدرت کمی بالاتر از سیگنال واقعی ردیابی کنید. در عین حال، با توجه به مشخصه تکرار چرخه ای کد شبه در سیگنال فریب، اگر فریب در یک چرخه شبه کد موفقیت آمیز نباشد، سیگنال فریب می تواند به طور خودکار کشش را در چرخه شبه کد بعدی تا گیرنده هدف اجرا کند. با موفقیت هدایت می شود. هنگامی که سیگنال فریب حلقه ردیابی شبه کد گیرنده هدف را با موفقیت کشید، طرف مزاحم می تواند نتایج زمان بندی و موقعیت یابی گیرنده هدف را با تنظیم فاز شبه کد سیگنال فریب ارسالی کنترل کند و در نتیجه به هدف فریب دادن هدف دست یابد. گیرنده. بنابراین این روش برای وضعیت فعلی گیرنده الزامات بالایی ندارد. می تواند هم گیرنده را در حالت ضبط و هم گیرنده را در حالت ردیابی حالت پایدار فریب دهد. بنابراین، عملی بودن فریب مولد اغلب قوی تر است.
با توجه به کاربرد عمیق سیستمهای ناوبری ماهوارهای در جنبههای مختلف زندگی اجتماعی و کاربردهای نظامی، پایانههای دریافت ناوبری ماهوارهای که سیگنالهای نادرست دریافت میکنند و نتایج زمانبندی و موقعیتیابی نادرست ممکن است منجر به پیامدهای فاجعهباری شود. بنابراین، تعداد اقدامات متقابل هواپیماهای بدون سرنشین با استفاده از فناوری فریب ناوبری به طور مداوم در حال افزایش است. در 13 آذر 1390، نیروهای پدافند هوایی ایران مدعی شدند که با استفاده از فناوری فریب، یک فروند هواپیمای شناسایی بدون سرنشین آمریکایی "RQ-170" را در مرزهای شرقی کشور به تصرف خود درآوردهاند. اگر این گزارش صحت داشته باشد، اولین کاربرد فناوری فریب ناوبری در اقدامات متقابل هواپیماهای بدون سرنشین خواهد بود. بر اساس گزارش رسانه ها، روسیه به عنوان یک کشور بزرگ در فناوری و تجهیزات جنگ الکترونیک، به احتمال زیاد در سال های اخیر به طور گسترده ای از فناوری فریب برای هدف قرار دادن GPS استفاده کرده است. بر اساس گزارش C4ADS، یک سازمان غیرانتفاعی در ایالات متحده، در سال های اخیر نزدیک به 10000 حادثه فریب GPS مختلف در روسیه رخ داده است، به خصوص زمانی که پوتین رئیس جمهور روسیه از مناطق حساس بازدید می کند، سیگنال های فریبنده GPS در اطراف آنها ظاهر می شود. علاوه بر این، این سازمان گزارش داد که در مسکو، به ویژه در نزدیکی کرملین، گردشگران بارها مکان خود را به عنوان فرودگاه در فاصله 32 کیلومتری پیدا کرده اند. این رویکرد روسیه به طور گسترده به عنوان یک اقدام دفاعی برای جلوگیری از حمله تسلیحات هدایت شونده GPS ناتو در نظر گرفته می شود. تحلیل ها نشان می دهد که ارتش روسیه توانسته است بارها و بارها حملات خوشه ای هواپیماهای بدون سرنشین را که پایگاه های نظامی خود در سوریه را هدف قرار می دهند، خنثی کند، احتمالاً به دلیل استفاده از فناوری فریب جزئی GPS.